Team introduction:
Focusing on the forefront and hotspots of international disciplinary research, this research focuses on innovative design and performance analysis of modern mechanisms such as reconfigurable mechanisms, metamorphic mechanisms, deployable mechanisms, soft robot mechanisms, biomimetic robot mechanisms, and industrial robot mechanisms. It closely revolves around industrial needs, conducts research on modern mechanisms theory and equipment design, and creates a research team and talent training base with domestic influence in the field of mechanisms and robotics research. The team has led 8 projects funded by the National Natural Science Foundation of China (NSFC), 2 key science and technology projects funded by the Ministry of Education of China, 3 major and key science and technology projects funded by Guangxi, as well as multiple provincial natural science foundation and prefecture level projects; Published over 200 academic papers in domestic and foreign academic journals, and published 3 academic monographs (1 of which was selected for the National Key Book Publishing Plan for the 12th Five Year Plan); Authorized more than 200 national invention patents and 3 textbooks as chief and deputy chief editors; Received one second prize of Guangxi Natural Science Award.
Team Leader:
Wang Rugui, male, born in 1979 in Juye, Shandong Province, is a member of the Communist Party of China, PhD, professor, and doctoral supervisor, and is a visiting scholar at the Center for Robotics Research at King's College London (2015-2016). He is also a visiting scholar at the Department of Mechanical Engineering at Tsinghua University (2019-2020). (For details, please refer to the Teacher Information Network of Guangxi University). E-mail:rugui@gxu.edu.cn
Main members:
Cai Ganwei, PhD/Professor/Doctoral Supervisor. Guangxi Excellent Expert, Government Special Allowance Expert of the State Council, Deputy Chairman of the Guangxi District Committee of the 93 Society, Executive Member of the Guangxi Political Consultative Conference, Former leader of Guangxi Dominant Key Disciplines, Director and Academic Committee Member of the Chinese Society of Mechanical Engineering, Vice Chairman of the Chinese Society of Mechanical Dynamics, Executive Member of the Intelligent Manufacturing Professional Committee of the Chinese Society of Artificial Intelligence, Executive Member of the Rotordynamics Professional Committee of the Chinese Society of Vibration Engineering, Member of the Institutional Committee of the Chinese Society of Mechanical Engineering, Member of the Mechanical Design Society, Executive Director of the Machine Tool Committee, Vice Chairman of the Guangxi Society of Mechanics, Former vice Chairman of the Guangxi Society of Mechanical Engineering, Executive Editorial Committee Member of the "Vibration, Diagnosis and Testing", Editorial Committee Member of the "Mechanical Design", Editorial Committee Member of the "Popular Science", and Deputy Director of the Editorial Committee of the "Equipment, Member of the Expert Committee of Guangxi Natural Science Foundation.
Yang Xujuan, PhD/Professor/Master's Supervisor (For details, please refer to the Teacher Information Network of Guangxi University)
Li Yanzhou, PhD/Associate Professor/Master's Supervisor (For details, please refer to the Teacher Information Network of Guangxi University)
Wang Xiang, PhD candidate/associate professor/master's supervisor (For details, please refer to the Teacher Information Network of Guangxi University)
Wei Wei, PhD candidate/engineer (For details, please refer to the Teacher Information Network of Guangxi University)
Fu Bing, PhD candidate/experimenter (For details, please refer to the Teacher Information Network of Guangxi University)
Main research directions:
1. Theoretical and Applied Research on Robot Mechanisms
2. Research on the Theory and Methods of Mechanical Performance Design
3. Research on Nonlinear Dynamics Theory and Applications
Main research projects:
[1]
Study on eye-brain-hand self-coordination method of all-weather tea-picking robot
Funding source: the National Natural Science Foundation of China(NSFC), the Key Project of the Joint Fund, No.U23A20175
Start: 01-01-2024 / End: 30-12-2027
[2]
Study on the dynamic reliability for task-oriented controllable metamorphic mechanisms system
Funding source: the National Natural Science Foundation of China(NSFC), No.51865001
Start: 01-01-2019 / End: 30-12-2022
[3]
Study on the stability for task-oriented controllable metamorphic mechanisms system
Funding source: the National Natural Science Foundation of China(NSFC), No.51265003
Start: 01-01-2013 / End: 30-12-2016
[4]
Research on Dynamic Performance of Controllable Mechanism Robots
Funding source: the National Natural Science Foundation of China(NSFC), No. 51765005
Start: 01-01-2018 / End: 30-12-2021
[5]
Theoretical Research on Multi degree of Freedom Controllable mechanism Design with Metamorphic Function
Funding source: the National Natural Science Foundation of China(NSFC), No. 51075077
Start: 01-01-2011 / End: 30-12-2014
[6]
Mechanism and Design Theory Research of Nonlinear Resonance and Coupled Resonance Vibration Aging New Equipment
Funding source: the National Natural Science Foundation of China(NSFC), No. 51365004
Start: 01-01-2014 / End: 30-12-2017
[7]
Study on System Coupling Dynamics of Composite Materials Components
Funding source: the National Natural Science Foundation of China(NSFC), No. 51075031
Start: 01-01-2011 / End: 30-12-2013
[8]
Study on the Global coupled dynamic performance of mixed flow hydroelectric generator units
Funding source: the National Natural Science Foundation of China(NSFC), No. 50565001
Start: 01-01-2006 / End: 30-12-2008
[9]
Study on the nonlinear dynamics for task-oriented controllable metamorphic mechanisms system
Funding source: Ministry of Education of the People’s Republic of China, the Key Science and Technology Project, No. 212133
Start: 01-01-2012 / End: 30-08-2014
[10]
Nonlinear Dynamics Study of Two Degree of Freedom Controllable Five Bar Mechanism System
Funding source: Ministry of Education of the People’s Republic of China, the Key Science and Technology Project, No. 205119
Start: 01-01-2005 / End: 30-08-2007
[11]
Research and Analysis on the Design Theory of Combined Rope Saw Machine
Funding source: Department of Science and Technology of Guangxi Province, China, the Science and Technology Major Special Project, No. AA18118007-4
Start: 01-04-2018 / End: 30-04-2020
[12]
Research and Analysis on the Design Theory of Combined Rope Saw Machine
Funding source: Department of Science and Technology of Guangxi Province, China, the Science and Technology Major Special Project, No. AA18242011-2
Start: 01-04-2018 / End: 30-04-2020
Highlights of research outcomes and contributions
[1]
Research on dynamic performance for task-oriented metamorphic mechanisms system

(a) Single-DOF configuration (b) 2-DOF configuration

(c) Physical experiment
Fig.1 Metamorphic palletizing robot
https://ars.els-cdn.com/content/image/1-s2.0-S0307904X22006035-mmc1.mp4
Innovation points:
(1) A design model for a cellular palletizing robot has been proposed;
(2) Established a nonlinear dynamic modeling and analytical method for variable topology mechanism systems;
(3) Established stability analysis theory for variable topology mechanism systems and dynamic reliability analysis theory for multiple failure modes.
(4) A reliability analysis method based on variable state space is proposed, which can be used for probabilistic, non probabilistic, and mixed reliability analysis calculations. The reliability of a cellular mechanism system is calculated by discretizing the safety space in the state space.
[2]
Theory research on performance analysis and design of simulated “soft” rigid self-adaptive grasper
As the end effector of industrial robots, the grasper is one of the frontiers and hotspots of world scientific research. In recent years, people have made good achievements in the design and performance analysis of robot graspers, and there are research reports in important academic journals such as Science and Nature. Prof. Wang Rugui propose a design model of " Simulated ‘Soft’ Rigid Adaptive Grasper ", which is different from existing hand grippers. It has the characteristics of self-adaptive object shape, uniform grasping force, single degree of freedom drive, and full rigid structure, which can meet the diverse needs of grasper operation. It has outstanding innovation and important engineering application prospects.
In recent years, Professor Wang Rugui has led the Advaned Mechanisms and Roboticized Equipment Research Team, dedicating their efforts to the design and performance analysis of robot end effectors. Their commendable work has been published in renowned domestic and international journals, including Journal of Mechanical Engineering, Mechanism and Machine Theory, Journal of Mechanisms and Robotics - Transactions of the ASME, and Journal of Mechanical Design - Transactions of the ASME, producing a series of high-quality academic papers.
Notably, the research achievements of Professor Wang Rugui’s team have been named after school's name GXU in the field of mechanical engineering. In January 2023, an academic paper titled “Self-Adaptive Grasping Analysis of a Simulated 'Soft' Mechanical Grasper Capable of Self-Locking” was published in the journal of the American Society of Mechanical Engineers (ASME). The innovative grasper design, emulating a “soft” yet adaptive rigid gripper, was aptly named “GXU Grasper” by the distinguished journal.
Furthermore, it is worth acknowledging that historically, representative grasper design schemes in the domain of robotics have often been denoted with names inspired by individuals or institutions, such as Stanford Grasper, Utah/MIT Grasper, DLR/HIT Grasper, and others.
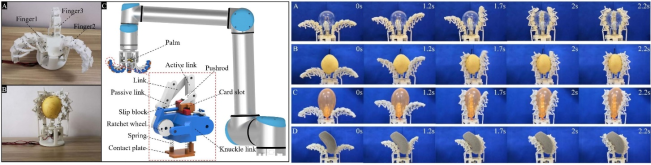
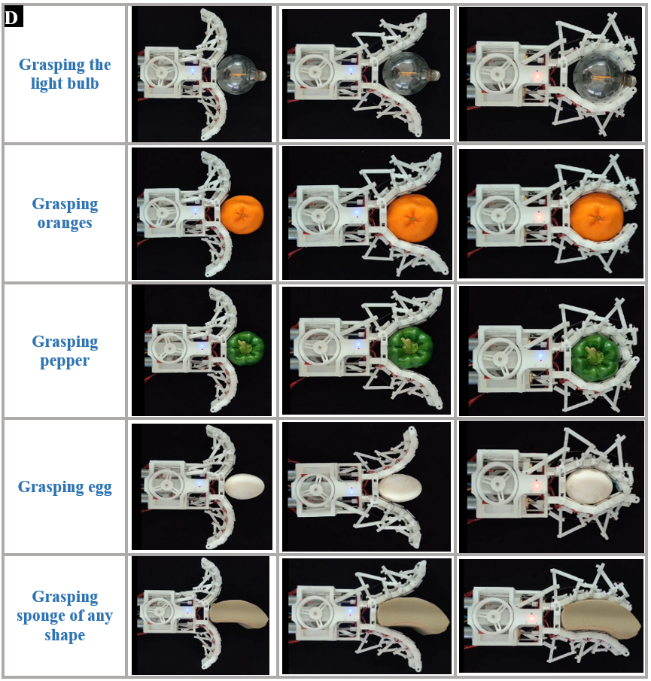
Fig. 2 GXU-Grasper
https://ars.els-cdn.com/content/image/1-s2.0-S0094114X20304572-mmc1.mp4
https://ars.els-cdn.com/content/image/1-s2.0-S0094114X20304572-mmc2.mp4
https://ars.els-cdn.com/content/image/1-s2.0-S0094114X20304572-mmc3.mp4
https://ars.els-cdn.com/content/image/1-s2.0-S0094114X20304572-mmc4.mp4
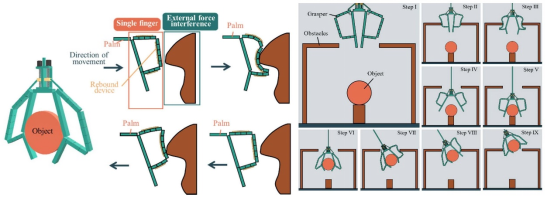
Fig. 3 GXU-F-Grasper
https://ars.els-cdn.com/content/image/1-s2.0-S0094114X23002021-mmc1.mp4
[3]
Design and theory analysis of advanced mechanism
In recent years, Prof. Wang Rugui have also conducted research on the design and performance analysis of modern mechanisms such as origami mechanisms, reconfigurable mechanisms, metamorphic mechanisms, deployable mechanisms, and designed a variety of mechanism configurations. The related research has obtained more than 70 national invention patents of China. The achievements have good application space in aerospace, mobile communications and other fields.
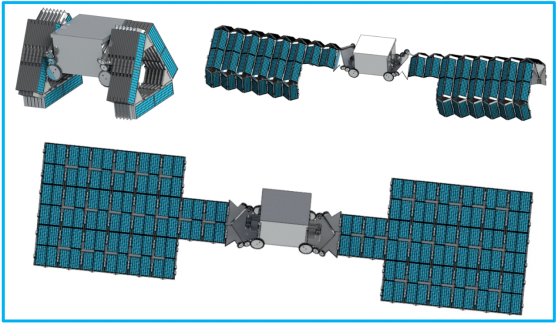
Fig. 4 Origami-inspired Modular Thick-panel Deployable Mechanism

Fig. 5 Plane-space Polyhedral Reconfigurable Metamorphic Mechanism
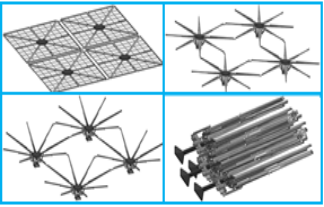
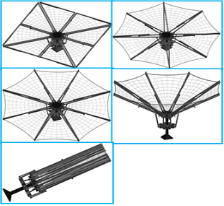
Fig. 5 Space Deployable-foldable Antenna Mechanism
Sincerely welcome postdoctoral, doctoral, master's, and undergraduate students who wish to engage in research in robotics and robotics to join the team. We also welcome experts and scholars engaged in research in the fields of robotics and mechanics, mechanical design and theory, to contact Professor Wang Rugui and collaborate on related research.
E-mail:rugui@gxu.edu.cn


